


Overview
The BarrelBeast is a system that comprises of two main subsystems: a Mobile Robot and a Controller. The Controller will be able to acquire user input using two Altronics Z6363 joysticks and buttons. It will also be able to display certain readings to the user on the Altronics Z7011 LCD display on its surface. The Mobile Robot is a motor driven vehicular robot that is controlled by the controller. Data is transferred between the robot and the controller through the use of XBee RF Modules. The Motor used is the Polulu 707 Motor Driver.
It consists of two major components: the mobile robot and the commander. The commander is a handheld battery powered device that allows the user to control the direction and velocity of the mobile robot via radio communication. The functionality of each major component, the mobile robot and commander, has been separated into a series of modules
Approach
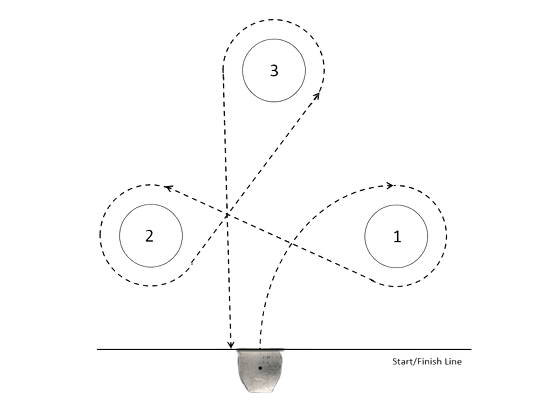
The Mobile Robot should operate in two modes: Manual and Assist. Manual mode is used to allow the user to freely drive the Robot. Assist mode uses PID control along with two Sharp GP2Y0A41SK0F Infrared Sensors on either end of the robot to move it automatically around cylindrical surfaces.The main objective of the BarrelBeast is to create a Robot that can mimic and compete in a to-scale barrel race.
The University of Sydney
Vishant Prasad