Control System Design Project

Overview
This report will focus on the design of a cruise control system working in conjunction with a controller that will be automatically changing lanes. This project specifically aims to design a controller allowing the vehicle to:
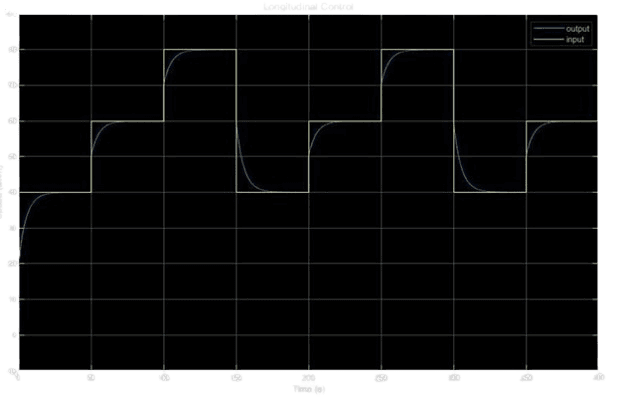
1. achieve any desired speed while still accounting for constant disturbances,
2. discuss the effect of a system zero or when the vehicle is reversing 𝑣0 < 0,
3. change from one target speed to another and 4. be able to automatically change lanes.
Approach
From the objectives listed in the motivation section, the dynamics that will be analysed includes the change from speeds alongside force disturbances such as transitions in terrain and elevation with the examination of mass changes within the vehicle.
The first component of the control system will be the design of the cruise control which will encompass more specifically:
a. analysis of the steepness of hills and changes such as slope and
b. the analysis of the effect of additional passengers and/or cargo.
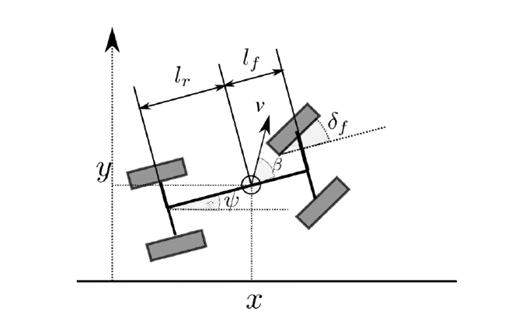
The second component of the controller design will focus on the lateral control of the system, more specifically the lane changing element.
a. Side-to-side motion of the vehicle with the wheel angle being the controller input.
b. The motion of the centre of mass and position described by the following differential equations.
The University of Sydney
Vishant Prasad