Navigation & Control System

Overview
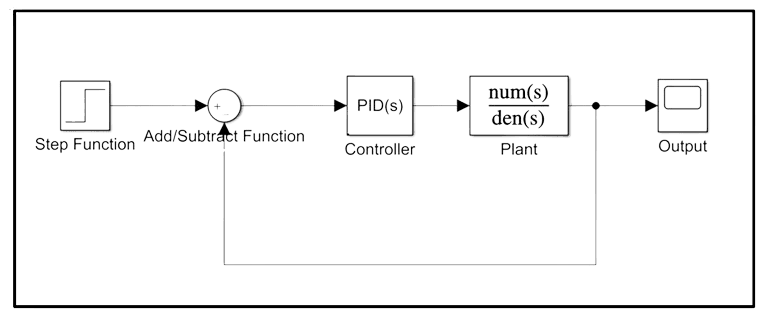
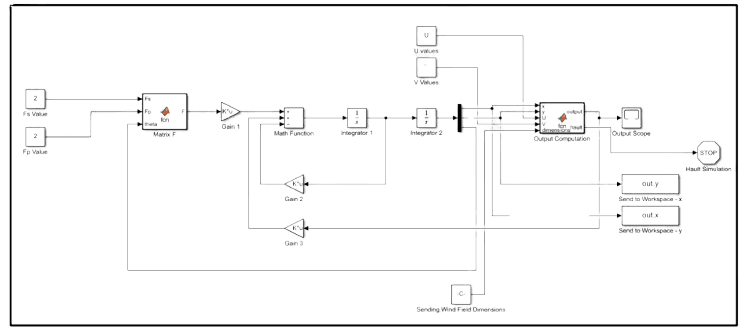
This project encompasses the design process and conditions surrounding simulated control and navigation of an unmanned small hovercraft within a wind field.
Approach
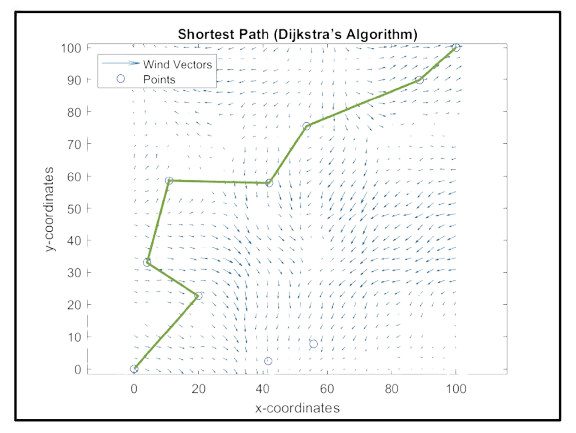
Within the 2D space, the maximum wind-speed is defined by default as 1. The UAV can move with an air-speed |𝑉𝑎| of 1
Dijkstra’s Algorithm was implemented and displayed through the system in the most comprehensive manner possible to the user of the system – this was a breakdown of the cost of each path being compared to the desired path that the user of the system is requested to input. This input is error checked affirming that the input is within the specifications of the randomly generated sample range. This aspect of the system can be improved in future by employing a character check to confirm input is a valid integer and have improved, more specific error messages.
The University of Sydney
Vishant Prasad