TurtleBot Mechatronic System


Overview
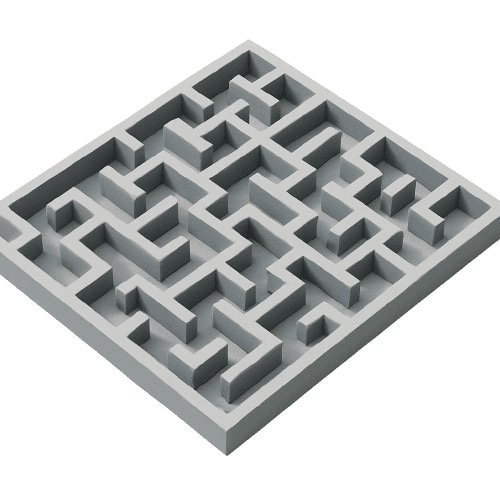
The problem or exercise requires the TurtleBot to successfully complete or solve a maze. This is to be both in a simulation as well as a physical model. The physical model of the maze is to be created using cardboard with the TurtleBot moving through the cardboard environment (where most of the material is utilized represents the maze walls). The simulation is modelled with a combination of programs including:
RViz
Gazebo
ROS Kinetic & Melodic
Ubuntu 18.04 & 16.04
Approach
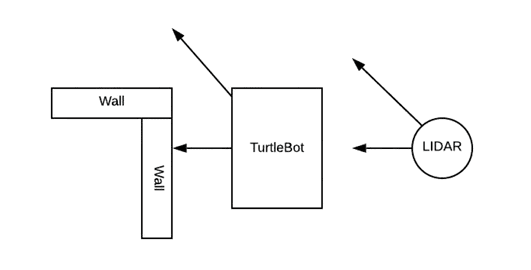
The physical simulation that requires autonomous solving of the turtlebot employs the use of a remote PC program to monitor the progress of completion of the robot in the maze. All decisions, movement and overall solution is to occur autonomously on the robot.
The University of Sydney
Vishant Prasad