Overview
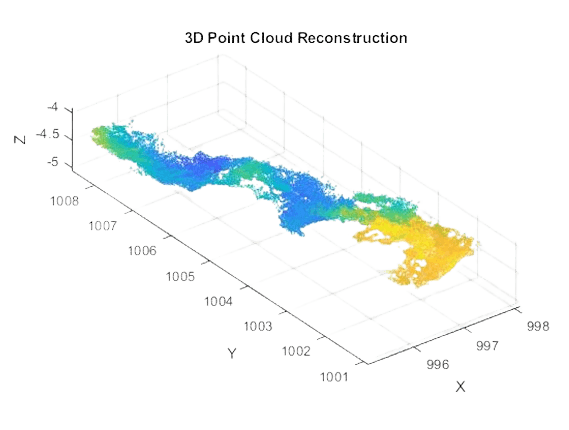
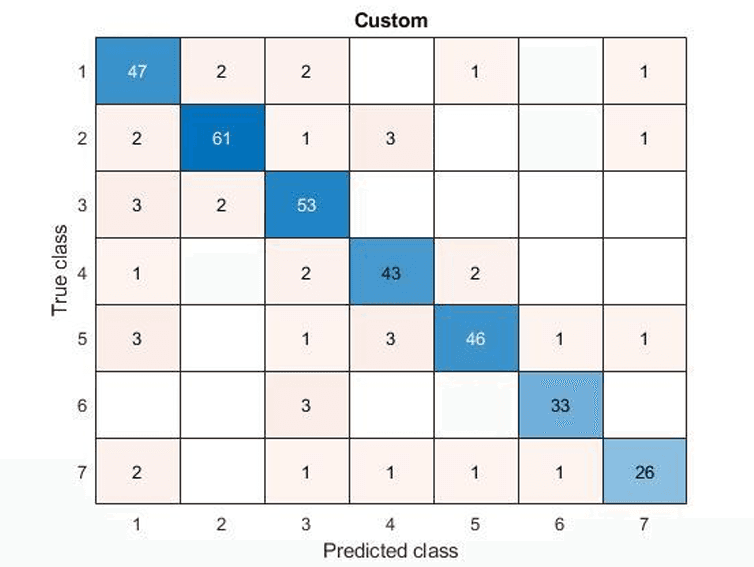
The following project highlights the process of constructing two overall programs and carrying out investigations utilizing these two systems. This includes a 3D using Underwater Stereo Vision, whereby, given stereo calibration and camera pose data is utilized alongside comparison to true terrain data. The second program includes a Classification/Recognition system that can identify and classify specific objects in given images and assign semantic labels that describe the context of the environment.
Approach
The methodology of the program includes firstly configuration of the two perspectives and sets of images collected from the camera – left and right images from respective eyes. This would encompass the calibration of the camera through geometric models – more specifically, a set of equations that will allow for the prediction of expected pixel locations for a certain common point that lies on the image. This prediction would include gaining information on the given point’s location in a 3D space, the camera’s orientation and position in 3D space and parameters describing the camera’s optical system. The stereo calibration has been collected and compiled into a file for ease of loading into the program alongside a reference of the real terrain for comparations and the camera pose data.
The University of Sydney
Vishant Prasad